tap_tempo
Tap tempo, mul/div as inputs
IO Variants: 3
Variant: 1
Inlets
bool32.rising Tap input
int32.positive Tempo multiplier
int32.positive Tempo divisor
Outlets
bool32.pulse Clock output
frac32.positive Phasor output
Parameters
bool32.mom tap
uint32_t ktimer;
uint32_t last_ktime;
uint32_t phase;
float base_freq;
uint32_t mul;
uint32_t div;
uint32_t old_phase;
uint32_t old_inlet_tap;
uint32_t old_param_tap;ktimer = 0;
last_ktime = 0;
phase = 0;
base_freq = 64.0f * (double)(1 << 30) * 1.0f / (SAMPLERATE * 1.0f);
old_phase = 0;
old_inlet_tap = 0;
old_param_tap = 0;if ((inlet_tap && !old_inlet_tap) || (param_tap && !old_param_tap)) {
float period = (ktimer - last_ktime);
if (period < 15000) // 5 seconds at most between taps
{
period = period * 16;
if (period < 1.0f) {
period = 1.0f;
}
float f_clock = SAMPLERATE / period;
base_freq = 64.0f * (float)(1 << 30) * f_clock / (SAMPLERATE * 1.0f);
phase = 0;
}
last_ktime = ktimer;
}
if (inlet_mul < 1) {
mul = 1;
} else {
mul = inlet_mul;
}
if (inlet_div < 1) {
div = 1;
} else {
div = inlet_div;
}
float freq = (base_freq * (float)mul) / (float)div;
phase += (uint32_t)freq;
outlet_clock = 0;
if (phase < old_phase) {
outlet_clock = 1;
}
outlet_phasor = (phase >> 5);
old_phase = phase;
old_inlet_tap = inlet_tap;
old_param_tap = param_tap;
ktimer++;Variant: 2
Inlets
bool32.rising Tap input
Outlets
bool32.pulse Clock output
frac32.positive Phasor output
Parameters
int32 clockmul
int32 clockdiv
bool32.mom tap
uint32_t ktimer;
uint32_t last_ktime;
uint32_t phase;
float base_freq;
uint32_t old_phase;
uint32_t old_inlet_tap;
uint32_t old_param_tap;ktimer = 0;
last_ktime = 0;
phase = 0;
base_freq = 64.0f * (double)(1 << 30) * 1.0f / (SAMPLERATE * 1.0f);
old_phase = 0;
old_inlet_tap = 0;
old_param_tap = 0;if ((inlet_tap && !old_inlet_tap) || (param_tap && !old_param_tap)) {
float period = (ktimer - last_ktime);
if (period < 15000) // 5 seconds at most between taps
{
period = period * 16;
if (period < 1.0f) {
period = 1.0f;
}
float f_clock = SAMPLERATE / period;
base_freq = 64.0f * (float)(1 << 30) * f_clock / (SAMPLERATE * 1.0f);
phase = 0;
}
last_ktime = ktimer;
}
float freq = (base_freq * (float)param_clockmul) / (float)param_clockdiv;
phase += (uint32_t)freq;
outlet_clock = 0;
if (phase < old_phase) {
outlet_clock = 1;
}
outlet_phasor = (phase >> 5);
old_phase = phase;
old_inlet_tap = inlet_tap;
old_param_tap = param_tap;
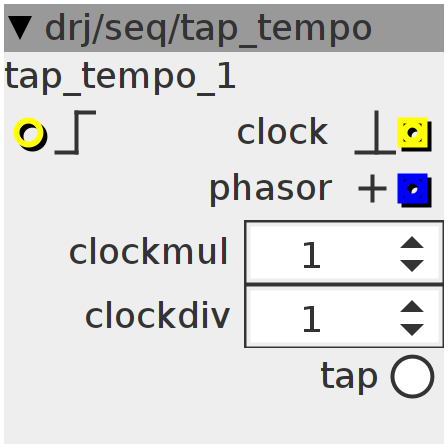
ktimer++;Variant: 3
Inlets
bool32.rising Tap input
Outlets
frac32.positive Phasor output
bool32.pulse Clock output
Parameters
bool32.mom tap
Attributes
spinner clockmul
spinner clockdiv
uint32_t ktimer;
uint32_t last_ktime;
uint32_t phase;
int32_t clock_freq;
uint32_t old_phase;
uint32_t old_inlet_tap;
uint32_t old_param_tap;ktimer = 0;
last_ktime = 0;
phase = 0;
clock_freq = 64 * (uint32_t)((float)(1 << 30) * 1.0f / (SAMPLERATE * 1.0f));
old_phase = 0;
old_inlet_tap = 0;
old_param_tap = 0;if ((inlet_tap && !old_inlet_tap) || (param_tap && !old_param_tap)) {
float period = (ktimer - last_ktime);
if (period < 15000) // 5 seconds at most between taps
{
period = period * 16;
if (period < 1.0f) {
period = 1.0f;
}
float f_clock = SAMPLERATE / period;
float freq = 64.0f * (float)(1 << 30) * f_clock / (SAMPLERATE * 1.0f);
freq = (freq * (float)attr_clockmul) / (float)attr_clockdiv;
clock_freq = (uint32_t)freq;
phase = 0;
}
last_ktime = ktimer;
}
phase += clock_freq;
outlet_clock = 0;
if (phase < old_phase) {
outlet_clock = 1;
}
outlet_phasor = (phase >> 5);
old_phase = phase;
old_inlet_tap = inlet_tap;
old_param_tap = param_tap;
ktimer++;