BPMXT
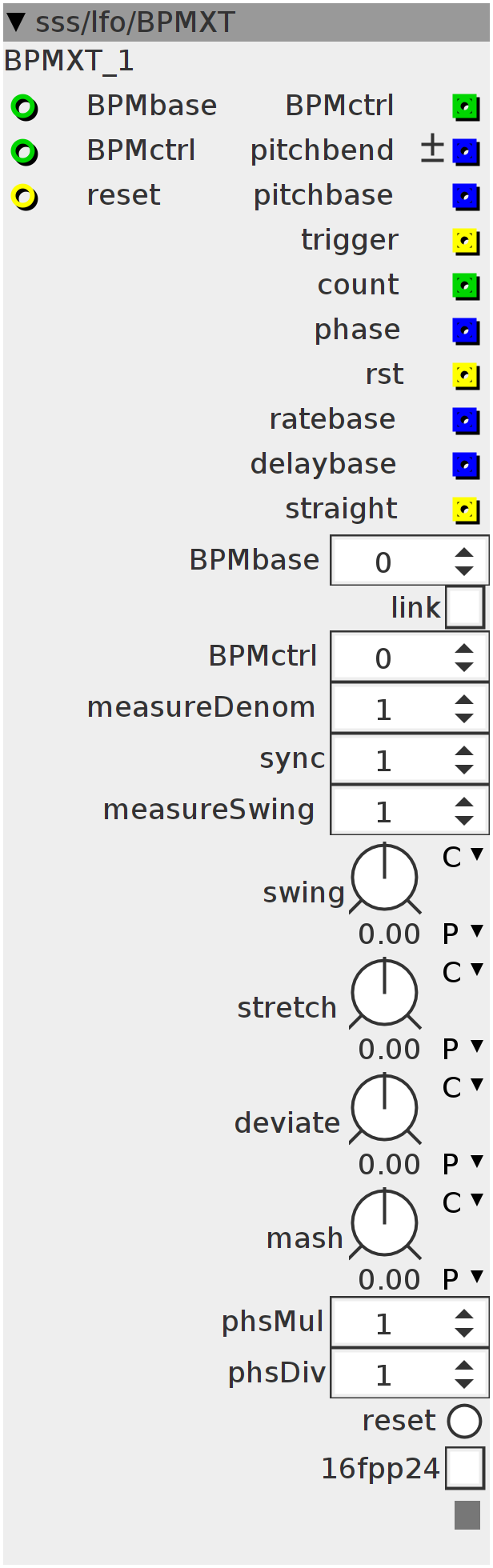
BPM clock module with lots of extra goodies to sync other modules to the clock or pitchbend depending on BPM change
Inlets
int32 BPMbase
int32 BPMctrl
bool32 reset
Outlets
int32 BPMctrl
int32 count
frac32.bipolar pitchbend
frac32 pitchbase
frac32 phase
frac32 ratebase
frac32 delaybase
bool32 trigger
bool32 rst
bool32 straight
Parameters
bool32.mom reset
int32 BPMbase
int32 BPMctrl
int32 measureDenom
int32 sync
int32 measureSwing
int32 phsMul
int32 phsDiv
bool32.tgl link
bool32.tgl 16fpp24
frac32.s.map swing
frac32.s.map stretch
frac32.s.map deviate
frac32.s.map mash
Displays
bool32 d1
uint32_t phs;
int32_t PHS;
int cnt;
int CNT;
int count;
bool trg;
int32_t Phase;
bool r;
int rate1 = 3;
int rate2 = 4;
uint32_t frq;
int32_t swing;
int32_t Swing;
int32_t out;
int32_t vi27 = (1 << 27) - 1;
int snc;
int32_t LOG(int32_t in) {
Float_t f;
f.f = in;
int32_t r1 = ((f.parts.exponent & 0x7F) - 18) << 24;
int32_t r3 = logt[f.parts.mantissa >> 15] << 10;
out = r1 + r3;
}
int32_t FTOM(int32_t freq) {
int32_t ptch;
int32_t mid;
MTOFEXTENDED(0, mid);
LOG(mid);
mid = out;
int32_t to;
LOG(freq);
to = out;
return ptch = (to - mid >> 1) * 3;
};cnt = 0;
swing = 0;
snc = 0;
count = 0;
Phase = 0;// int32_t pitch;
int BPMbase = param_BPMbase + inlet_BPMbase;
int BPMctrl = param_BPMctrl + inlet_BPMctrl;
outlet_rst = 0;
int32_t freq;
if ((BPMbase > 0) && (BPMctrl > 0)) {
MTOFEXTENDED(0, freq)
float32_t ratio;
ratio = (float32_t)BPMctrl / BPMbase;
if (param_link < 1) {
freq = freq * ratio;
} else {
PExParameterChange(&parent->PExch[PARAM_INDEX_attr_legal_name_BPMbase],
param_BPMctrl, 0xFFFD);
BPMbase = BPMctrl;
}
bool reset = param_reset || inlet_reset;
if (reset && r) {
outlet_rst = 1;
Phase = 0;
snc = 0;
cnt = 0;
swing = 0;
count = 0;
r = 0;
PHS = 0;
} else {
if (!reset)
r = 1;
frq = (uint32_t)(1 << 30) / (22500 / BPMctrl);
Phase += frq >> 2;
PHS = Phase * param_measureDenom;
}
if ((uint32_t)Phase < phs) {
count += 1;
count = count >= param_phsDiv ? 0 : count;
snc += 1;
if (snc >= param_sync) {
cnt = -1;
snc = 0;
}
}
if ((PHS > swing) && !trg) {
trg = 1;
CNT = (CNT + 1);
cnt = cnt >= (param_measureSwing * param_sync) ? 0 : cnt;
cnt = CNT / param_measureSwing;
int32_t deviate = ((int32_t)(param_deviate * 0.999) << 2);
int32_t mash = ((int32_t)(param_mash * 0.999) << 2);
int32_t stretch = ((int32_t)(param_stretch * 0.999) << 2);
bool sel = ((cnt >> 1) & 1);
sel = ((cnt / (4 - param_16fpp24)) & 1) > 0 ? !sel : sel;
sel = sel && (cnt & 1);
swing = ((((int32_t)(-param_swing * 0.999) << 4) * (cnt & 1)) +
(((cnt >> 1) & 1) > 0 ? -deviate : deviate) +
(((cnt & 3) - 1) * stretch + (sel > 0 ? mash : -mash))) *
0.99;
} else if ((PHS <= Swing) && trg) {
trg = 0;
Swing = swing;
}
disp_d1 = outlet_trigger = trg;
outlet_pitchbend = FTOM(freq);
outlet_pitchbase = FTOM(frq) + outlet_pitchbend;
outlet_BPMctrl = param_BPMctrl;
outlet_count = cnt;
outlet_phase = (((phs >> 5) / param_phsDiv + ((count << 27) / param_phsDiv)) *
param_phsMul) &
vi27;
outlet_straight = Phase > 0 ? 1 : 0;
} else {
outlet_pitchbend = FTOM(1);
outlet_pitchbase = FTOM(1);
outlet_BPMctrl = 0;
outlet_trigger = 0;
outlet_count = cnt;
outlet_straight = 0;
}
phs = (uint32_t)Phase;
outlet_delaybase = (uint64_t)(1 << 30) * (1 << 17) / frq;
outlet_ratebase = frq >> 2;